
Advances in 3D Reality Mapping: Gaussian Splatting vs Photogrammetry
- Hammer Missions

- Jan 26
- 5 min read
Updated: Feb 3
If you work in the drone or reality mapping world, chances are you’ve come across the term 3D Gaussian splatting over the last year or so. It’s a technique that’s gained a lot of attention for its ability to create highly photorealistic 3D scenes—and it’s often discussed alongside, or in comparison to, more established methods like photogrammetry.
But what exactly is 3D Gaussian splatting? Why is it generating so much interest? And how does it really compare to photogrammetry when it comes to real-world drone applications?
In this article, we’ll break down how 3D Gaussian splatting works, where it excels, what its limitations are, and when it makes sense to use it instead of (or alongside) traditional 3D reconstruction techniques.
What Is 3D Gaussian Splatting?
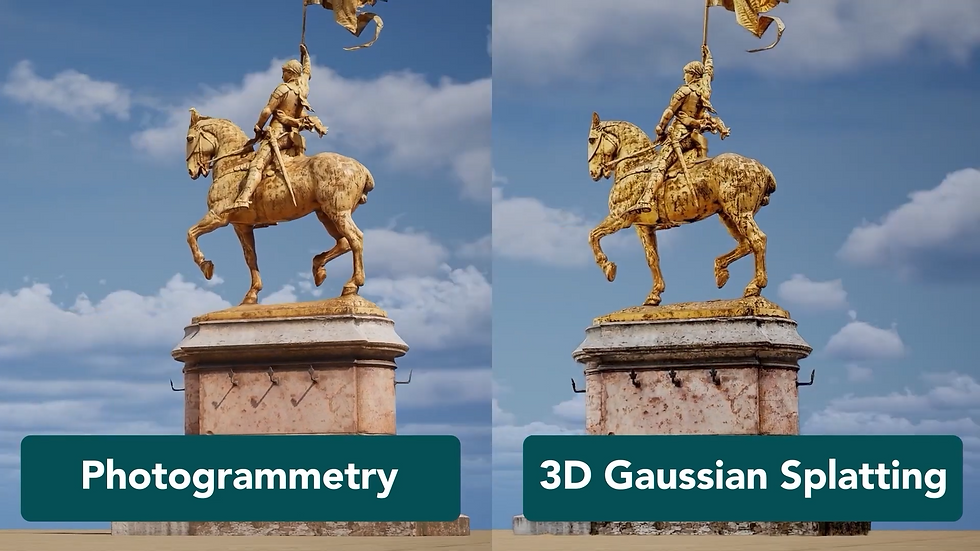
At a high level, 3D Gaussian splatting is a 3D processing technique that takes a set of overlapping images and produces a highly photorealistic 3D scene. Unlike photogrammetry, which focuses on reconstructing precise geometry, Gaussian splatting prioritises visual realism.
The resulting models are particularly good at representing:
Thin structures like cables and wires
Transparent or reflective surfaces such as glass
Water and other materials that photogrammetry traditionally struggles with
This visual fidelity is the main reason Gaussian splatting has attracted so much attention.
What Does “Gaussian” Actually Mean?
The terminology can sound intimidating, but the core idea is fairly simple.
A Gaussian refers to a probability distribution—often visualised as a bell-shaped curve—that’s commonly used in mathematics and statistics. In the context of 3D Gaussian splatting, each point in a scene is represented not as a hard, fixed point, but as a soft, probabilistic shape in 3D space.
Each of these Gaussians has properties such as:
Position
Shape
Colour
Opacity
Instead of explicitly building a solid mesh, the system learns how to best render these Gaussians from different camera viewpoints.

How 3D Gaussian Splatting Works
The workflow starts in a familiar place: images with overlap.
A set of images is captured, similar to a photogrammetry flight or walk-through.
A sparse point cloud is generated using structure-from-motion techniques.
From this sparse geometry, the algorithm learns how to represent the scene using thousands (or millions) of 3D Gaussians.
These Gaussians are optimised so that, when rendered from any camera position, the output closely matches the original images.
The key difference is that the system focuses on rendering quality, not on explicitly reconstructing dense geometry or meshes.

Photogrammetry: The Traditional Approach
Photogrammetry has been the backbone of drone-based 3D reconstruction for years. Its pipeline typically looks like this:
Images are aligned using structure-from-motion.
A dense point cloud is generated by estimating depth across images.
A mesh is created from this dense point cloud.
Textures are applied to the mesh to produce a usable 3D model.
The result is a geometrically meaningful representation of the scene—one that supports measurements, quantities, and accurate spatial analysis.
This is why photogrammetry remains the default choice for:
Construction
Engineering
Surveying
Any application where dimensional accuracy matters

Key Differences: Gaussian Splatting vs Photogrammetry
When comparing Gaussian splatting vs photogrammetry, there's three key areas to consider:
1. Geometry vs Visual Realism
Photogrammetry produces real geometry (dense point clouds and meshes).
Gaussian splatting produces a visually rich scene optimised for rendering.
2. Measurement Accuracy
Photogrammetry supports accurate measurements and spatial analysis.
Gaussian splatting sacrifices geometric precision in favour of realism.
3. Challenging Surfaces
Gaussian splatting performs much better with:
Glass
Water
Thin or complex structures
These are areas where photogrammetry can struggle due to poor feature matching or inconsistent depth estimation.
The Trade-Off: What Do You Lose?
The main cost of using 3D Gaussian splatting is measurement reliability.
Because the technique is not focused on building a true geometric representation, the resulting model:
Is not ideal for precise measurements
Does not provide the same dimensional confidence as photogrammetry
Should not be relied on for centimetre-level accuracy
For applications that require strict tolerances—such as active construction sites or engineering surveys—photogrammetry (or LiDAR) is still the better option.
💡 Enjoying these insights? Subscribe to the Hammer Missions newsletter for expert tips, real-world drone inspection case studies, and the latest updates on how AI is transforming building assessments:
Choosing the Right Tool for the Job
As with most things in reality capture, there’s no single “best” solution—only the right tool for the task.
Use Gaussian splatting when:
Visual realism is the priority
You’re creating inspection visuals or presentations
The scene includes glass, water, or fine detail
You want fast, accessible 3D visualisation
Use photogrammetry when:
You need reliable measurements
Quantification and geometry matter
Accuracy outweighs pure visual quality
Use LiDAR when:
You need very high accuracy
The project demands robust, survey-grade geometry
In some workflows, combining these techniques can provide the best of all worlds.
Software and Accessibility
One of the reasons Gaussian splatting has grown so quickly is how accessible it is. There are already several tools available that make it easy to experiment, including:
Polycam
Luma AI
Nerfstudio
Postshot
Many of these tools allow users to work from simple image sets—or even video—making Gaussian splatting approachable without specialised hardware.

Where Is This All Going?
The broader trend is clear: 3D capture is becoming more powerful, more accessible, and more intelligent.
Camera technology is improving rapidly
Sensors are cheaper and higher resolution
3D processing techniques continue to evolve
AI is increasingly able to extract insight from complex spatial data
Gaussian splatting is another step in this direction. It doesn’t replace photogrammetry, but it expands the toolbox—offering new ways to visualise and understand spaces that were previously difficult to reconstruct convincingly.
Final Thoughts
3D Gaussian splatting is exciting not because it replaces existing techniques, but because it adds a new dimension to reality mapping. It highlights an important principle: sometimes what matters most is not perfect geometry, but how well a scene can be understood visually.
As with drones themselves, success comes from understanding the strengths and limitations of each approach—and choosing the right one when the opportunity arises.
If you’re curious, the best way to learn is to try it. Experiment with a dataset, explore the outputs, and see how it fits into your own workflows.
Interested in learning more about drone-based facade inspections or seeing how AI can enhance your workflows? Reach out to the Hammer Missions team — we’d love to show you how to bring this process to your next project.
About Us
Hammer Missions is a software AI firm helping companies in the built environment leverage drones and AI for assessing existing conditions. Having seen 5000+ projects, we're pleased to be working with leading firms in AEC to streamline and scale the process of facade inspections. If you're looking to learn more about how AI can automate and accelerate your building assessment projects, please get in touch with us below. We look forward to hearing from you.



