
Roof Inspections with Hammer Missions
- Hammer Missions

- May 1, 2019
- 4 min read
Updated: Feb 6
Overview
Hammer Missions is a drone flight planning and 3D mapping software platform designed for the commercial drone industry. We support a large number of mission types on both mobile tablets through Hammer App and web-based environments through Hammer Hub.
Whether it's inspection, mapping or 3D models, Hammer can adapt to it.
Tutorial
Before going through this tutorial, we highly recommend reading our guide on how to conduct roof inspections using drones, which will give you a high-level overview of what to expect in roof inspection missions. Once you have the high-level overview, you're ready to learn how to plan your mission using Hammer Missions.
In this tutorial, we will focus on horizontal inspections — 1 of the many inspection missions supported by Hammer:
Horizontal Inspection — of buildings, roofs, and other infrastructure.
Linear Inspection — of pipelines, railroads, and railway tracks.
Vertical Inspection — of building walls, cliffs, and other vertical structures.
Video
If you prefer watching a video instead, here’s how to use the inspection mission in Hammer Missions for roof inspections:
Horizontal Inspection
This type of inspection is useful for surveying building roofs/construction sites with high GPS accuracy.
In this mission, Hammer Missions calculates picture points inside a user-defined shape and flies the drone to these points maintaining a constant altitude and heading throughout the mission. The drone stops at every point in the mission to ensure high accuracy on the recorded GPS and to focus/zoom the camera.
Steps to Create
Tap on the add(+) button in the top right corner.
Choose ‘Inspection’ from the mission's view
Draw a shape over the area to be inspected.
Note: A shape can also be drawn by flying the drone to the appropriate GPS coordinates and tapping the back (right) button on the remote controller.
4. Once you are happy with the shape, click OK on the right panel. This will generate a dotted grid for inspection in the drawn shape.

Creating horizontal inspection missions
Steps to Configure
Tap on the white gear icon on the mission you wish to configure, which will open a settings menu.
Use the settings menu to configure the mission settings.

Configuring a horizontal inspection mission
Brief description of the available settings:
Altitude: Flight altitude for all generated points (blue dots) in the mission.
Ground Offset: Offset from the ground to take into account for correct image overlap calculations.
For e.g. if you would like the drone to fly at 40m above the takeoff point, and the building’s roof is at 30m above the takeoff point, entering 30m would ensure that the overlaps are calculated with the camera’s image size/footprint at 30m.
Image Overlap: The % of overlap between images in both forward and sideward directions.
Flight Direction: The direction of flight for the generated flight plan.
Unlike a mapping mission, the drone stops at every point in the inspection mission, therefore the flight direction is simply to take advantage of the wind rather than reducing the number of turns.
Camera Direction: The orientation of the drone and camera. By default, this is set as the same as the flight direction, but can be adjusted if the aim is to orient the drone at an angle to the flight path. This can be especially useful for solar inspections.
Gimbal Tilt: The angle (in degrees) of the gimbal while flying the mission. This can be useful to survey roofs/structures that are not perfectly horizontal to the ground, but instead at an angle.
Steps to Simulate
Once you are finished creating and configuring the mission, simply press the play button in the right panel.
If no drone is connected, Hammer Missions will prompt you to add a simulator, press OK and choose a home location for the simulation. Then press OK.
The simulation will begin and you’ll see a simulated drone appear on the screen flying the inspection mission.

Steps to Fly
Once you are happy with the created mission, simply connect your drone to Hammer through the USB port on the remote controller.
You’ll see a drone icon appear on the screen at its current location.
Press Play to start the mission.
Press Pause anytime to pause the mission, and play to resume the mission.
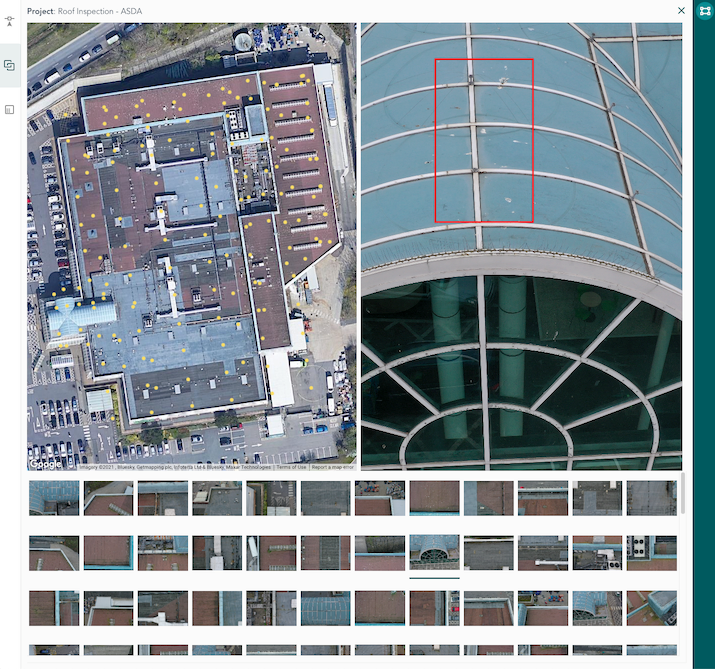
Post Processing
Once you've collected the data, we recommend using Hammer Hub - our data inspection platform to sift through the images and annotate your findings. If you'd like to learn more about data processing options, please feel free to get in touch with us at team@hammermissions.com.
Summary
And…that’s it! Now you know how to create, simulate and fly your own inspection mission in Hammer. If you currently do not have access to Hammer Missions, you can get started over here.
If you’d like to learn more about other missions supported in Hammer, including facade inspection, tower mapping, and more, please visit our mission tutorials.
If you're interested to learn more about our enterprise solutions, including mission collaboration, flight analytics, and more please contact us at team@hammermissions.com.
We look forward to hearing from you.
- The Hammer Team


